Note
Generated by nbsphinx from a Jupyter notebook. All the examples as Jupyter notebooks are available in the tudatpy-examples repo.
Re-entry trajectory
Copyright (c) 2010-2022, Delft University of Technology. All rights reserved. This file is part of the Tudat. Redistribution and use in source and binary forms, with or without modification, are permitted exclusively under the terms of the Modified BSD license. You should have received a copy of the license with this file. If not, please or visit: http://tudat.tudelft.nl/LICENSE.
Context
This examples focuses on the application of aerodynamic guidance in the context of a re-entry trajectory of the Space Transportation System (STS).
The aerodynamic guidance updates the angle of attack and the bank angle of the vehicle based on its flight conditions. The angle of attack is set to 40deg for a Mach number above 12, to 10deg for a Mach number below 6, and varies linearly between them. The bank angle is computed such that the derivative of the flight path angle over time equals 0, and the flight path angle is then constant. To do so, this example also showcases how to extract and use the flight condition and body properties during the simulation.
The initial state of the STS is most notably its initial altitude of 120km, velocity of 7.5km/s, and its flight path angle of -0.6deg.
A high number of dependent variable are also propagated in this example. All of them are then plotted at the end of this script.
Import statements
The required import statements are made here, at the very beginning.
Some standard modules are first loaded. These are numpy and matplotlib.pyplot.
Then, the different modules of tudatpy that will be used are imported.
[1]:
# Load standard modules
import math
import numpy as np
from matplotlib import pyplot as plt
[2]:
# Load tudatpy modules
from tudatpy.kernel.interface import spice
from tudatpy.kernel import numerical_simulation
from tudatpy.kernel.numerical_simulation import environment_setup, environment, propagation_setup, propagation
from tudatpy.kernel.astro import element_conversion
from tudatpy.kernel import constants
from tudatpy.util import result2array
Aerodynamic guidance class
First of all, let’s create a class that contains the aerodynamic guidance. This class needs to be inherited from propagation.AerodynamicGuidance.
During the initialisation of this class, the current system of simulated bodies will have to be input.
Then, the class must contain an updateGuidance() function that will be called at each simulation time step, taking the time as an input. Most importantly, this function updates both the angle of attack (self.angle_of_attack) and bank angle (self.bank_angle) of the vehicle.
The angle of attack \(\alpha\) should be updated as a function of the Mach number \(M\) as follows: - \(\alpha = 40\) deg if \(M > 12\). - \(\alpha = 10\) deg if \(M < 6\). - \(\alpha\) varies linearly between the two boundaries for other \(M\).
In practice, the following Logistic function is used so that the transition in \(\alpha\) between \(M=12\) and \(M=6\) is smoother:
The bank angle \(\sigma\) is computed so that, ideally, the flight path angle \(\gamma\) should stay constant over time (\(\dot{\gamma} = 0\)). The change in flight path angle over time \(\dot{\gamma}\) is related to the bank angle \(\sigma\) trough the equation below. We thus compute \(\sigma\) so that this equation equals 0.
In this equation, \(\chi\) and \(\delta\) are the heading and latitude angles. \(L\), \(m\), \(V\), and \(\omega_E\) are the lift force, vehicle mass, airspeed, and Earth rotation rate. \(g_d\) is the downwards (towards the centre of Earth) component of the gravitational acceleration. All of these values are either directly obtained or computed from the flight conditions, the aerodynamic coefficient interface, or the aerodynamic coefficient interface.
[3]:
# Create a class for the aerodynamic guidance of the STS, inheriting from 'propagation.AerodynamicGuidance'
class STSAerodynamicGuidance:
def __init__(self, bodies: environment.SystemOfBodies):
# Extract the STS and Earth bodies
self.vehicle = bodies.get_body("STS")
self.earth = bodies.get_body("Earth")
# Extract the STS flight conditions, angle calculator, and aerodynamic coefficient interface
environment_setup.add_flight_conditions( bodies, 'STS', 'Earth' )
self.vehicle_flight_conditions = bodies.get_body("STS").flight_conditions
self.aerodynamic_angle_calculator = self.vehicle_flight_conditions.aerodynamic_angle_calculator
self.aerodynamic_coefficient_interface = self.vehicle_flight_conditions.aerodynamic_coefficient_interface
self.current_time = float("NaN")
def getAerodynamicAngles(self, current_time: float):
self.updateGuidance( current_time )
return np.array([self.angle_of_attack, 0.0, self.bank_angle])
# Function that is called at each simulation time step to update the ideal bank angle of the vehicle
def updateGuidance(self, current_time: float):
if( math.isnan( current_time ) ):
self.current_time = float("NaN")
elif( current_time != self.current_time ):
# Get the (constant) angular velocity of the Earth body
earth_angular_velocity = np.linalg.norm(self.earth.body_fixed_angular_velocity)
# Get the distance between the vehicle and the Earth bodies
earth_distance = np.linalg.norm(self.vehicle.position)
# Get the (constant) mass of the vehicle body
body_mass = self.vehicle.mass
# Extract the current Mach number, airspeed, and air density from the flight conditions
mach_number = self.vehicle_flight_conditions.mach_number
airspeed = self.vehicle_flight_conditions.airspeed
density = self.vehicle_flight_conditions.density
# Set the current Angle of Attack (AoA). The following line enforces the followings:
# * the AoA is constant at 40deg when the Mach number is above 12
# * the AoA is constant at 10deg when the Mach number is below 6
# * the AoA varies close to linearly when the Mach number is between 12 and 6
# * a Logistic relation is used so that the transition in AoA between M=12 and M=6 is smoother
self.angle_of_attack = np.deg2rad(30 / (1 + np.exp(-2*(mach_number-9))) + 10)
# Update the variables on which the aerodynamic coefficients are based (AoA and Mach)
current_aerodynamics_independent_variables = [self.angle_of_attack, mach_number]
# Update the aerodynamic coefficients
self.aerodynamic_coefficient_interface.update_coefficients(
current_aerodynamics_independent_variables, current_time)
# Extract the current force coefficients (in order: C_D, C_S, C_L)
current_force_coefficients = self.aerodynamic_coefficient_interface.current_force_coefficients
# Extract the (constant) reference area of the vehicle
aerodynamic_reference_area = self.aerodynamic_coefficient_interface.reference_area
# Get the heading, flight path, and latitude angles from the aerodynamic angle calculator
heading = self.aerodynamic_angle_calculator.get_angle(environment.heading_angle)
flight_path_angle = self.aerodynamic_angle_calculator.get_angle(environment.flight_path_angle)
latitude = self.aerodynamic_angle_calculator.get_angle(environment.latitude_angle)
# Compute the acceleration caused by Lift
lift_acceleration = 0.5 * density * airspeed ** 2 * aerodynamic_reference_area * current_force_coefficients[2] / body_mass
# Compute the gravitational acceleration
downward_gravitational_acceleration = self.earth.gravitational_parameter / (earth_distance ** 2)
# Compute the centrifugal acceleration
spacecraft_centrifugal_acceleration = airspeed ** 2 / earth_distance
# Compute the Coriolis acceleration
coriolis_acceleration = 2 * earth_angular_velocity * airspeed * np.cos(latitude) * np.sin(heading)
# Compute the centrifugal acceleration from the Earth
earth_centrifugal_acceleration = earth_angular_velocity ** 2 * earth_distance * np.cos(latitude) * (np.cos(latitude) * np.cos(flight_path_angle) + np.sin(flight_path_angle) * np.sin(latitude) * np.cos(heading))
# Compute the cosine of the ideal bank angle
cosine_of_bank_angle = ((downward_gravitational_acceleration - spacecraft_centrifugal_acceleration) * np.cos(flight_path_angle) - coriolis_acceleration - earth_centrifugal_acceleration) / lift_acceleration
# If the cosine lead to a value out of the [-1, 1] range, set to bank angle to 0deg or 180deg
if (cosine_of_bank_angle < -1):
self.bank_angle = np.pi
elif (cosine_of_bank_angle > 1):
self.bank_angle = 0.0
else:
# If the cos is in the correct range, return the computed bank angle
self.bank_angle = np.arccos(cosine_of_bank_angle)
self.current_time = current_time
Configuration
NAIF’s SPICE kernels are first loaded, so that the position of various bodies such as the Earth can be make known to tudatpy.
Then, the start and end simulation epochs are setups. In this case, the start epoch is set to 0, corresponding to the 1st of January 2000. The times should be specified in seconds since J2000. Please refer to the API documentation of the time_conversion module here for more information on this.
[4]:
# Load spice kernels
spice.load_standard_kernels()
# Set simulation start epoch
simulation_start_epoch = 6000.0
# Set the maximum simulation time (avoid very long skipping re-entry)
max_simulation_time = 3*constants.JULIAN_DAY
# ## Environment setup
#
# Let’s create the environment for our simulation. This setup covers the creation of (celestial) bodies, vehicle(s), and environment interfaces.
#
Create the bodies
Bodies can be created by making a list of strings with the bodies that is to be included in the simulation.
The default body settings (such as atmosphere, body shape, rotation model) are taken from SPICE.
These settings can be adjusted. Please refere to the Available Environment Models in the user guide for more details.
Finally, the system of bodies is created using the settings. This system of bodies is stored into the variable bodies.
[5]:
# Create default body settings for "Earth"
bodies_to_create = ["Earth"]
# Create default body settings for bodies_to_create, with "Earth"/"J2000" as the global frame origin and orientation
global_frame_origin = "Earth"
global_frame_orientation = "J2000"
body_settings = environment_setup.get_default_body_settings(
bodies_to_create, global_frame_origin, global_frame_orientation)
# Create system of bodies (in this case only Earth)
bodies = environment_setup.create_system_of_bodies(body_settings)
Create the vehicle
Let’s now create the 5000kg vehicle for which Earth re-entry trajectory will be simulated.
[6]:
# Create vehicle object and set its constant mass
bodies.create_empty_body("STS")
bodies.get_body( "STS" ).set_constant_mass(5.0e3)
Add an aerodynamic coefficient interface
An aerodynamic coefficient interface is now added to the STS vehicle. These coefficients are interpolated from files that tabulate them as a function of angle of attack and Mach number.
[7]:
# Define the aerodynamic coefficient files (leave C_S empty)
aero_coefficients_files = {0: "input/STS_CD.dat", 2:"input/STS_CL.dat"}
# Setup the aerodynamic coefficients settings tabulated from the files
coefficient_settings = environment_setup.aerodynamic_coefficients.tabulated_force_only_from_files(
force_coefficient_files=aero_coefficients_files,
reference_area=2690.0*0.3048*0.3048,
independent_variable_names=[environment.angle_of_attack_dependent, environment.mach_number_dependent],
are_coefficients_in_aerodynamic_frame=True,
are_coefficients_in_negative_axis_direction=True
)
# Add predefined aerodynamic coefficients database to the body
environment_setup.add_aerodynamic_coefficient_interface(bodies, "STS", coefficient_settings)
[8]:
# ### Add rotation model based on aerodynamic guidance
# Create the aerodynamic guidance object
aerodynamic_guidance_object = STSAerodynamicGuidance(bodies)
rotation_model_settings = environment_setup.rotation_model.aerodynamic_angle_based(
'Earth', '', 'STS_Fixed', aerodynamic_guidance_object.getAerodynamicAngles )
environment_setup.add_rotation_model( bodies, 'STS', rotation_model_settings )
Propagation setup
Now that the environment is created, the propagation setup is defined.
First, the bodies to be propagated and the central bodies will be defined. Central bodies are the bodies with respect to which the state of the respective propagated bodies is defined.
[9]:
# Define bodies that are propagated
bodies_to_propagate = ["STS"]
# Define central bodies of propagation
central_bodies = ["Earth"]
Create the acceleration model
The acceleration settings that act on the STS vehicle are now defined. In this case, these simply consist in the Earth gravitational effect modelled as a point mass and of the aerodynamic acceleration of the Earth atmosphere.
The acceleration settings defined are then applied to STS vehicle in a dictionary.
This dictionary is finally input to the propagation setup to create the acceleration models.
[10]:
# Define the accelerations acting on the STS (Earth as a Point Mass, and Earth's atmosphere)
accelerations_settings_STS = dict(
Earth=[
propagation_setup.acceleration.point_mass_gravity(),
propagation_setup.acceleration.aerodynamic(),
]
)
acceleration_settings = {"STS": accelerations_settings_STS}
# Create the acceleration models
acceleration_models = propagation_setup.create_acceleration_models(
bodies, acceleration_settings, bodies_to_propagate, central_bodies
)
Define the initial state
The initial state of the vehicle that will be propagated is now defined. Most importantly, the STS vehicle starts 120km above Earth, at a velocity og 7500m/s, and a flight path angle of -0.6 deg (from the horizon).
This initial state always has to be provided as a cartesian state, in the form of a list with the first three elements reprensenting the initial position, and the three remaining elements representing the initial velocity.
In this case, let’s make use of the spherical_to_cartesian_elementwise() function that is included in the element_conversion module, so that the initial state can be input as Spherical elements, and then converted in Cartesian elements.
Finally, the initial state has to be converted from the Earth-fixed frame in which it is defined with the Spherical elements to the inertial frame.
[11]:
# Set the initial state of the STS as spherical elements, and convert them to a cartesian state
initial_radial_distance = bodies.get_body("Earth").shape_model.average_radius + 120e3
# Convert the initial state
initial_earth_fixed_state = element_conversion.spherical_to_cartesian_elementwise(
radial_distance=initial_radial_distance,
latitude=np.deg2rad(20),
longitude=np.deg2rad(140),
speed=7.5e3,
flight_path_angle=np.deg2rad(-0.6),
heading_angle=np.deg2rad(15),
)
# Convert the state from the Earth-fixed frame to the inertial frame
earth_rotation_model = bodies.get_body("Earth").rotation_model
initial_state = environment.transform_to_inertial_orientation(
initial_earth_fixed_state, simulation_start_epoch, earth_rotation_model
)
Define the dependent variables to save
In this example, we are interested in saving not only the propagated state of the vehicle over time, but also a set of so-called dependent variables, that are to be computed (or extracted and saved) at each integration step.
This page of the tudatpy API website provides a detailled explanation of all the dependent variables that are available.
[12]:
# Define the list of dependent variables to save during the propagation
dependent_variables_to_save = [
propagation_setup.dependent_variable.flight_path_angle("STS", "Earth"),
propagation_setup.dependent_variable.altitude("STS", "Earth"),
propagation_setup.dependent_variable.bank_angle("STS", "Earth"),
propagation_setup.dependent_variable.angle_of_attack("STS", "Earth"),
propagation_setup.dependent_variable.aerodynamic_force_coefficients("STS"),
propagation_setup.dependent_variable.airspeed("STS", "Earth"),
propagation_setup.dependent_variable.total_acceleration_norm("STS"),
propagation_setup.dependent_variable.mach_number("STS", "Earth")
]
Create the propagator settings
The propagator is finally setup.
First, a termination condition is defined so that the propagation as soon as one of these conditions is fulfilled: - The altitude gets below 25km. - The simulation time gets above 3 days.
Combinated termination settings are then needed, which can be done using the propagation_setup.propagator.hybrid_termination() function.
Subsequently, the integrator settings are defined using a RK4 integrator with the fixed step size of 0.5 seconds.
Then, the translational propagator settings are defined. These are used to simulate the orbit of Delfi-C3 around Earth.
[13]:
# Define a termination conditions to stop once altitude goes below 25 km
termination_altitude_settings = propagation_setup.propagator.dependent_variable_termination(
dependent_variable_settings=propagation_setup.dependent_variable.altitude("STS", "Earth"),
limit_value=25.0e3,
use_as_lower_limit=True)
# Define a termination condition to stop after a given time (to avoid an endless skipping re-entry)
termination_time_settings = propagation_setup.propagator.time_termination(simulation_start_epoch + max_simulation_time)
# Combine the termination settings to stop when one of them is fulfilled
combined_termination_settings = propagation_setup.propagator.hybrid_termination(
[termination_altitude_settings, termination_time_settings], fulfill_single_condition=True )
# Create numerical integrator settings
fixed_step_size = 0.5
integrator_settings = propagation_setup.integrator.runge_kutta_4(fixed_step_size)
# Create the propagation settings
propagator_settings = propagation_setup.propagator.translational(
central_bodies,
acceleration_models,
bodies_to_propagate,
initial_state,
simulation_start_epoch,
integrator_settings,
combined_termination_settings,
output_variables=dependent_variables_to_save
)
Propagate the trajectory
The re-entry trajectory is now ready to be propagated.
This is done by calling the create_dynamics_simulator() function of the numerical_simulation module. This function requires the bodies and propagator_settings that have all been defined earlier.
After this, the dependent variable history is extracted. The column indexes corresponding to a given dependent variable in the dep_vars variable are printed when the simulation is run, when create_dynamics_simulator() is called. Do mind that converting to an ndarray using the result2array() utility will shift these indexes, since the first column (index 0) will then be the times.
In this example, we are not interested in analysing the state history. This can however be accessed in the dynamics_simulator.state_history variable.
[14]:
# Create the simulation objects and propagate the dynamics
dynamics_simulator = numerical_simulation.create_dynamics_simulator(
bodies, propagator_settings
)
# Extract the resulting simulation dependent variables
dependent_variables = dynamics_simulator.dependent_variable_history
# Convert the dependent variables from a dictionary to a numpy array
dependent_variables_array = result2array(dependent_variables)
Post-process the propagation results
The results of the propagation are then processed to a more user-friendly form.
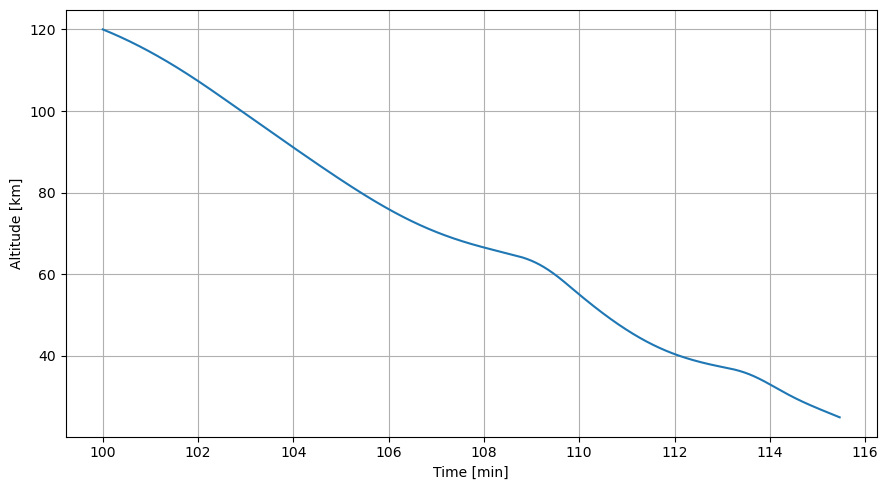
Altitude over time
First, let’s plot the altitude of the STS vehicle over time.
[15]:
# Extract the time from the dependent variables array (and convert from seconds to minutes)
time_min = dependent_variables_array[:,0] / 60
# Define a matplotlib.pyplot figure
plt.figure(figsize=(9, 5))
# Plot the altitude over time
plt.plot(time_min, dependent_variables_array[:,2]/1e3)
# Add label to the axis
plt.xlabel("Time [min]"), plt.ylabel("Altitude [km]")
# Add a grid
plt.grid()
# Use a tight layout to save space
plt.tight_layout()
plt.show()
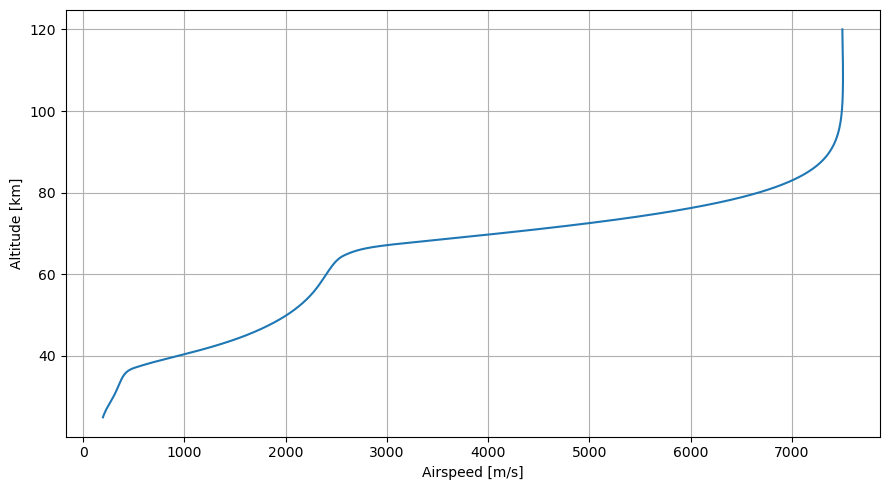
Airspeed vs altitude
Let’s now plot the altitude of the vehicle as a function of its airspeed. This gives insights into how the vehicle decelerates.
[16]:
# Plot the airspeed vs altitude
plt.figure(figsize=(9, 5))
plt.plot(dependent_variables_array[:,8], dependent_variables_array[:,2]/1e3)
plt.xlabel("Airspeed [m/s]"), plt.ylabel("Altitude [km]")
plt.grid()
plt.tight_layout()
plt.show()
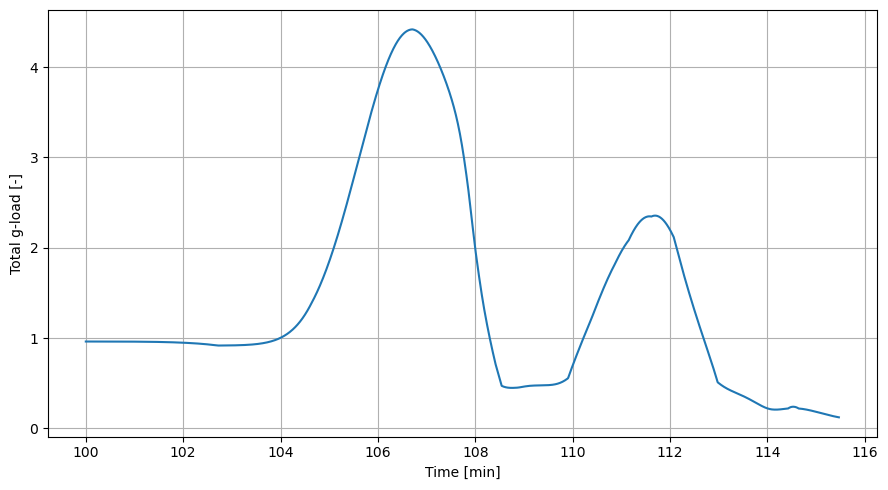
g-load over time
The following plot then shows the total acceleration on the vehicle in g (Earth’s gravitational acceleration at sea level).
[17]:
# Plot the g-load over time
plt.figure(figsize=(9, 5))
plt.plot(time_min, dependent_variables_array[:,9]/9.81)
plt.xlabel("Time [min]"), plt.ylabel("Total g-load [-]")
plt.grid()
plt.tight_layout()
plt.show()
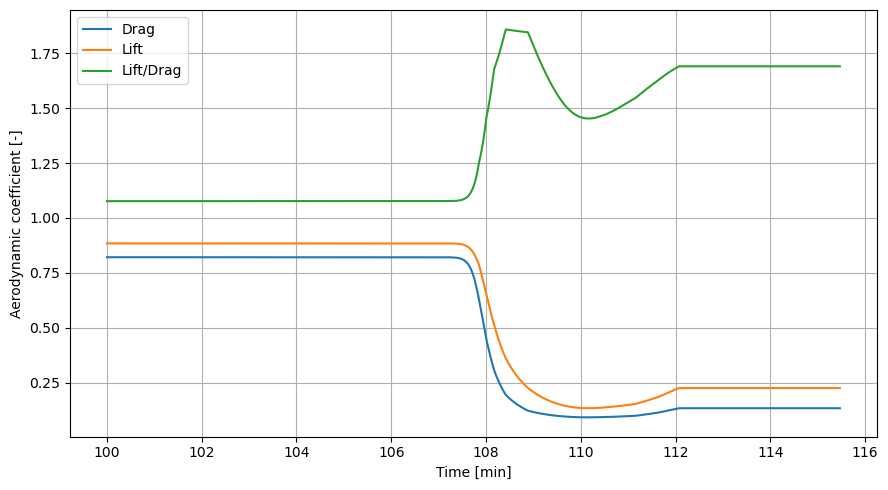
Aerodynamic coefficient over time
Plotting the aerodynamic coefficients over time can also give a good set of insights into what happens during re-entry.
[18]:
# Plot C_D, C_L, and L/D over time
plt.figure(figsize=(9, 5))
plt.plot(time_min, dependent_variables_array[:,5], label="Drag")
plt.plot(time_min, dependent_variables_array[:,7], label="Lift")
plt.plot(time_min, dependent_variables_array[:,7]/dependent_variables_array[:,5], label="Lift/Drag")
plt.xlabel("Time [min]"), plt.ylabel("Aerodynamic coefficient [-]")
# Also add a legend
plt.legend()
plt.grid()
plt.tight_layout()
plt.show()
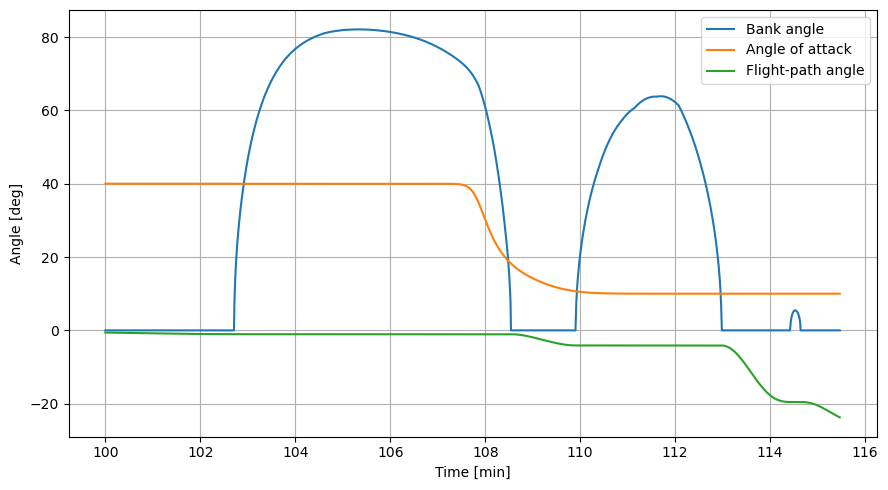
Angles over time
Plotting the angle of attack and bank angle over time allows to check if the aerodynamic guidance behaves as expected. Moreover, plotting the flight path angle over time allows to check how efficient the guidance was at keeping it constant.
[19]:
# Plot various angles over time (bank angle, angle of attack, and flight-path angle)
plt.figure(figsize=(9, 5))
plt.plot(time_min, np.rad2deg(dependent_variables_array[:,3]), label="Bank angle")
plt.plot(time_min, np.rad2deg(dependent_variables_array[:,4]), label="Angle of attack")
plt.plot(time_min, np.rad2deg(dependent_variables_array[:,1]), label="Flight-path angle")
plt.xlabel("Time [min]"), plt.ylabel("Angle [deg]")
plt.legend()
plt.grid()
plt.tight_layout()
plt.show()
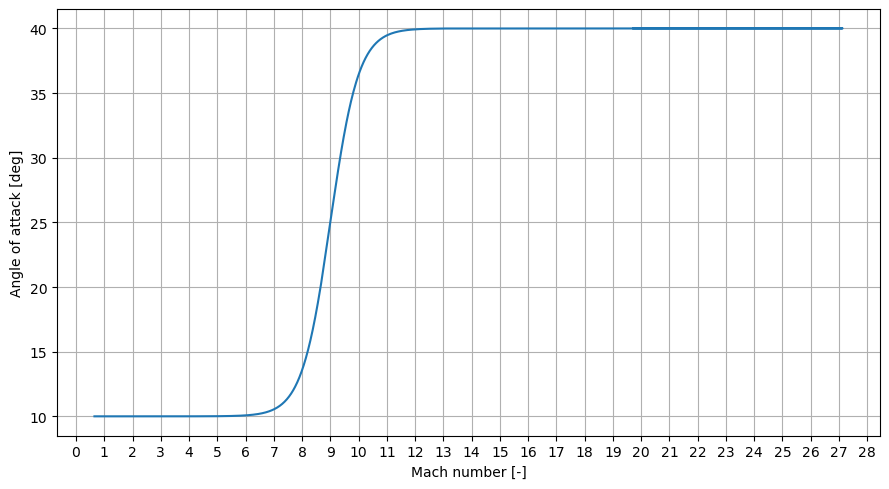
Angle of attack vs Mach number
Plotting the angle of attack as a function of the Mach number allows to check that it indeed is of 10deg below Mach 6, of 40deg above Mach 12, and that it varies more or less linearly (and smoothly) in-between.
[20]:
# Plot the AoA over Mach number
plt.figure(figsize=(9, 5))
plt.plot(dependent_variables_array[:,10], np.rad2deg(dependent_variables_array[:,4]))
plt.xlabel("Mach number [-]"), plt.ylabel("Angle of attack [deg]")
# Set the x-axis ticks spacing to 1
plt.xticks(np.arange(0, 28.1, 1))
plt.grid()
plt.tight_layout()
plt.show()
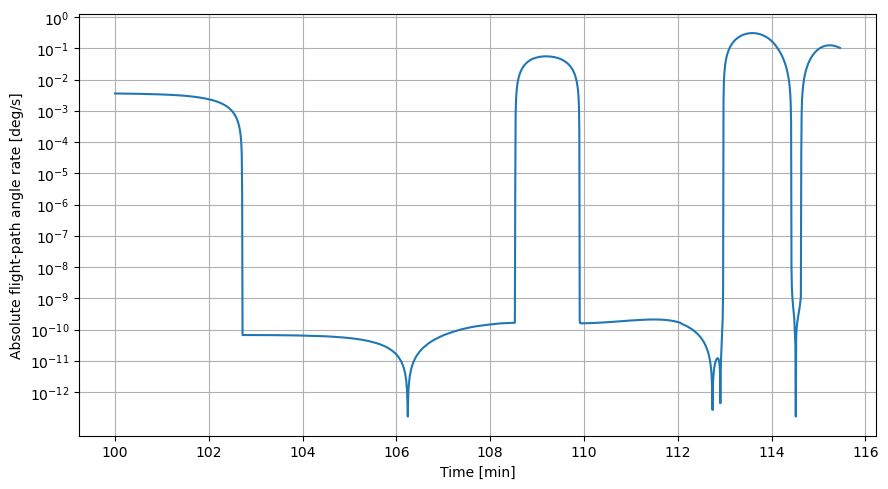
Derivative of flight path angle over time
Plotting the derivative of the flight path angle over time finally allows to analyse how constant the flight path angle really was.
[21]:
flight_path_angle = dependent_variables_array[:,1]
# Compute the derivative of the flight path angle over time (dot(gamma) = Delta gamma / Delta t)
flight_path_angle_derivative = np.fabs(( flight_path_angle[1:flight_path_angle.size] - flight_path_angle[0:-1])/fixed_step_size)
# Plot the derivative of the flight path angle over time
plt.figure(figsize=(9, 5))
plt.plot(time_min[0:-1], np.rad2deg(flight_path_angle_derivative))
plt.xlabel("Time [min]"), plt.ylabel("Absolute flight-path angle rate [deg/s]")
# Make the y-axis logarithmic
plt.yscale("log")
# Have a tick on the y-axis every power of 10
plt.yticks(10**np.arange(-12, 0.1, 1))
plt.grid()
plt.tight_layout()
plt.show()