

Estimation#
Estimation using simulated observations#
In the following examples, observations are simulated and then used as input for a covariance analysis and/or estimation.




Functionality to support estimation#
In the following examples, functionality is showcased that can be used to support (pre- and/or post-processing of observations) estimation

Estimation using pseudo-observations data#
In the following examples, Cartesian positions of bodies are taken from an external source and used as observations to which a Tudat dynamical model is fit.

Estimation using real observations#
In the following examples, real observations are used to fit compute residuals and/or compute dynamics of spacecraft and/or natural bodies.



Estimation using real observations from DSN/ESTRACK#
We also have the following examples that showcase the reading of, and estimation from radio tracking data from DSN/ESTRACK.
MRO - Comparing Doppler and Range Measurements from TNF Files to Simulated Observables
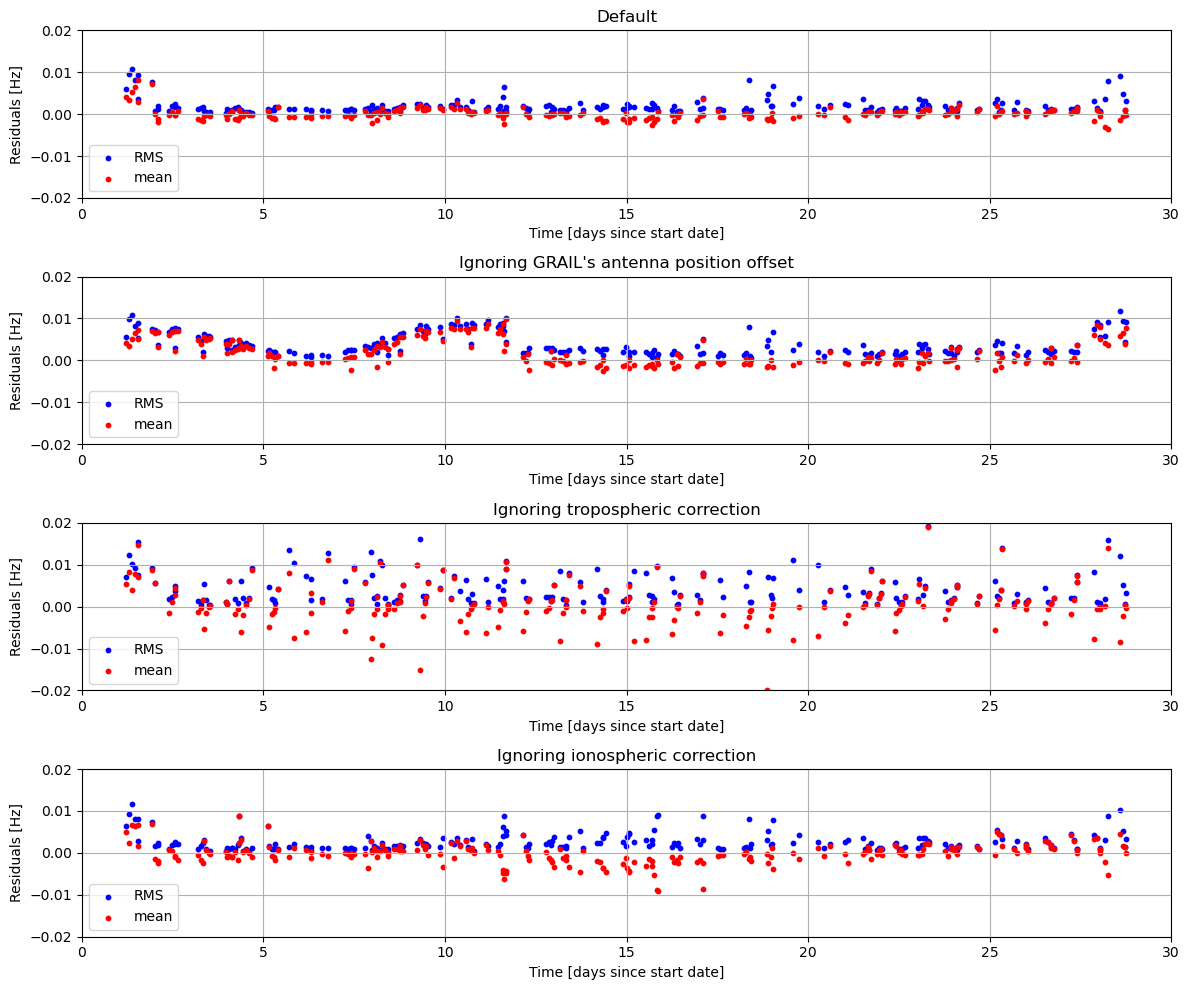
GRAIL - Comparing Doppler measurements from ODF files to simulated observables
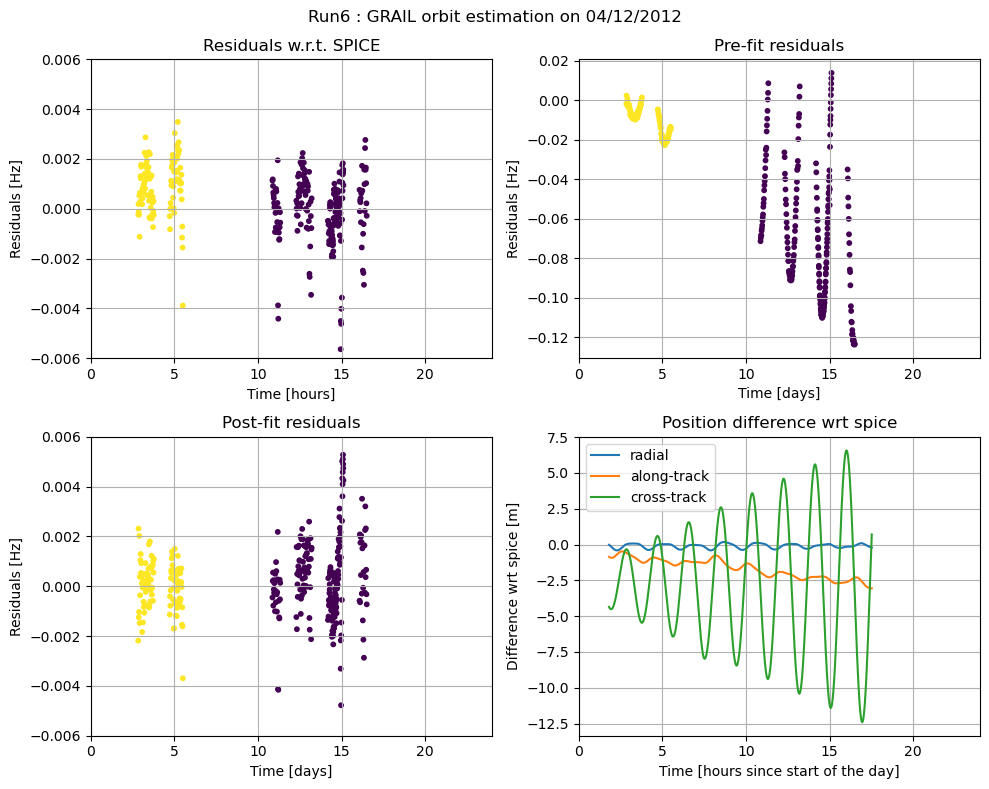
GRAIL - Estimating the spacecraft trajectory from ODF Doppler measurements
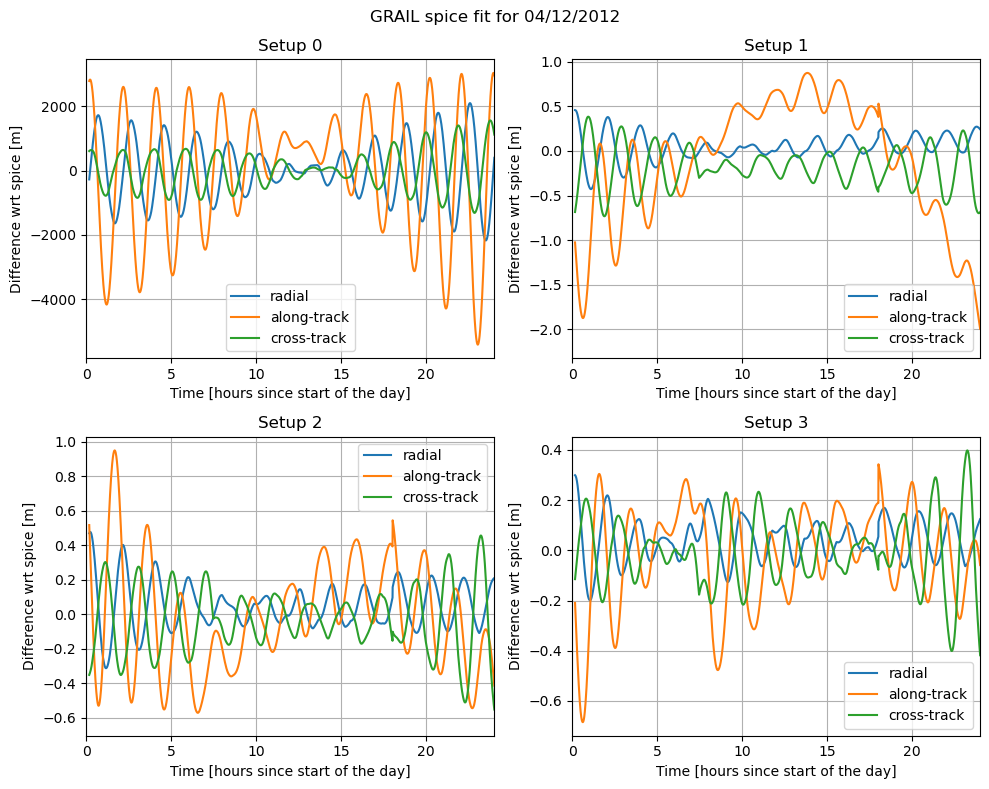
GRAIL - Fitting various models of the GRAIL spacecraft’s dynamics to the reference spice trajectory
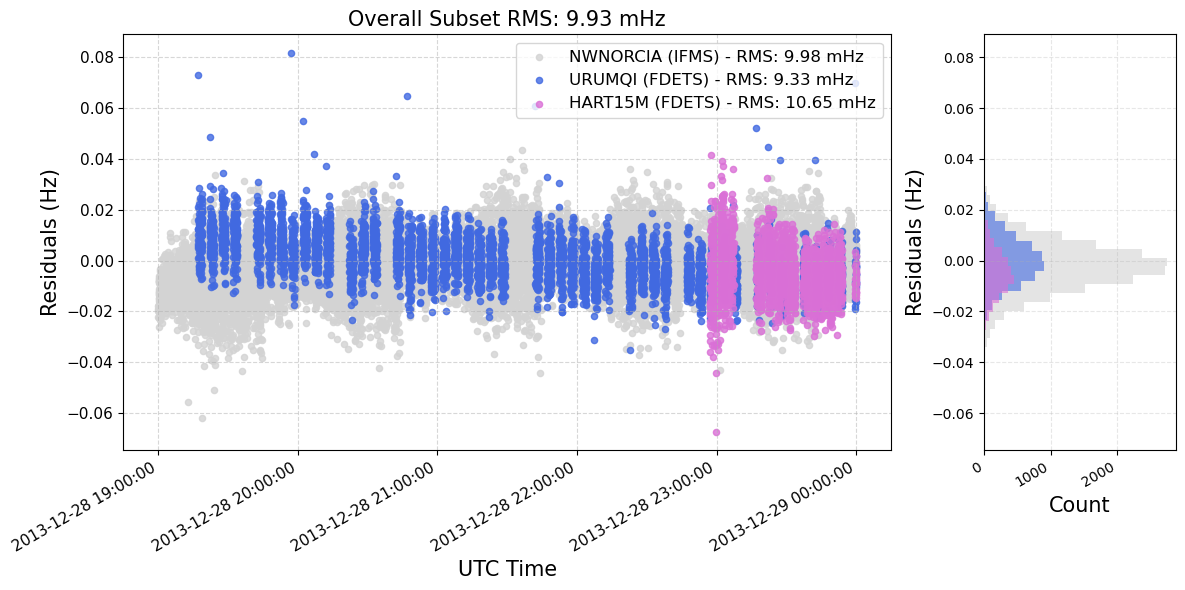
Mars Express Tracking Data Residuals Analysis
MRO - Orbit Determination Using TNF Doppler Observations