

Multiple Gravity Assists Transfer#
In this section, the preliminary design of multiple-leg interplanetary transfer trajectories is discussed. This module provides the functionalities for creating transfer trajectories consisting of multiple transfer legs or various types with powered and unpowered gravity assists. This allows high-thrust or low-thrust transfer trajectories with multiple flybys to be designed, as well as a hybrid of low- and high-thrust. For per-function details see the API documentation.
A multiple gravity-assist transfer (MGA) is constituted by a series of nodes and legs. The nodes correspond to the departure, gravity assist, and arrival planets (bodies), and the legs correspond to the trajectories between the nodes. Therefore, there is always one more node than leg. Note that the initial or final node may be departure/capture or a flyby. The legs may be of a number of different types, which is discussed more in-depth later on.
The module is implemented using simplified dynamical models for the nodes and legs. For the unpowered leg trajectory, for example, the transfer is for instance defined under the assumptions of the patched-conics approximation. This module allows for the flexible design of transfers using only analytical and semi-analytical methods, typically without any required numerical integration. This is particularly useful for preliminary mission design, where having a fast method is particularly important.
Note
The MGA model also allows defining transfers with a single leg (without any gravity assist).
General Model Description#
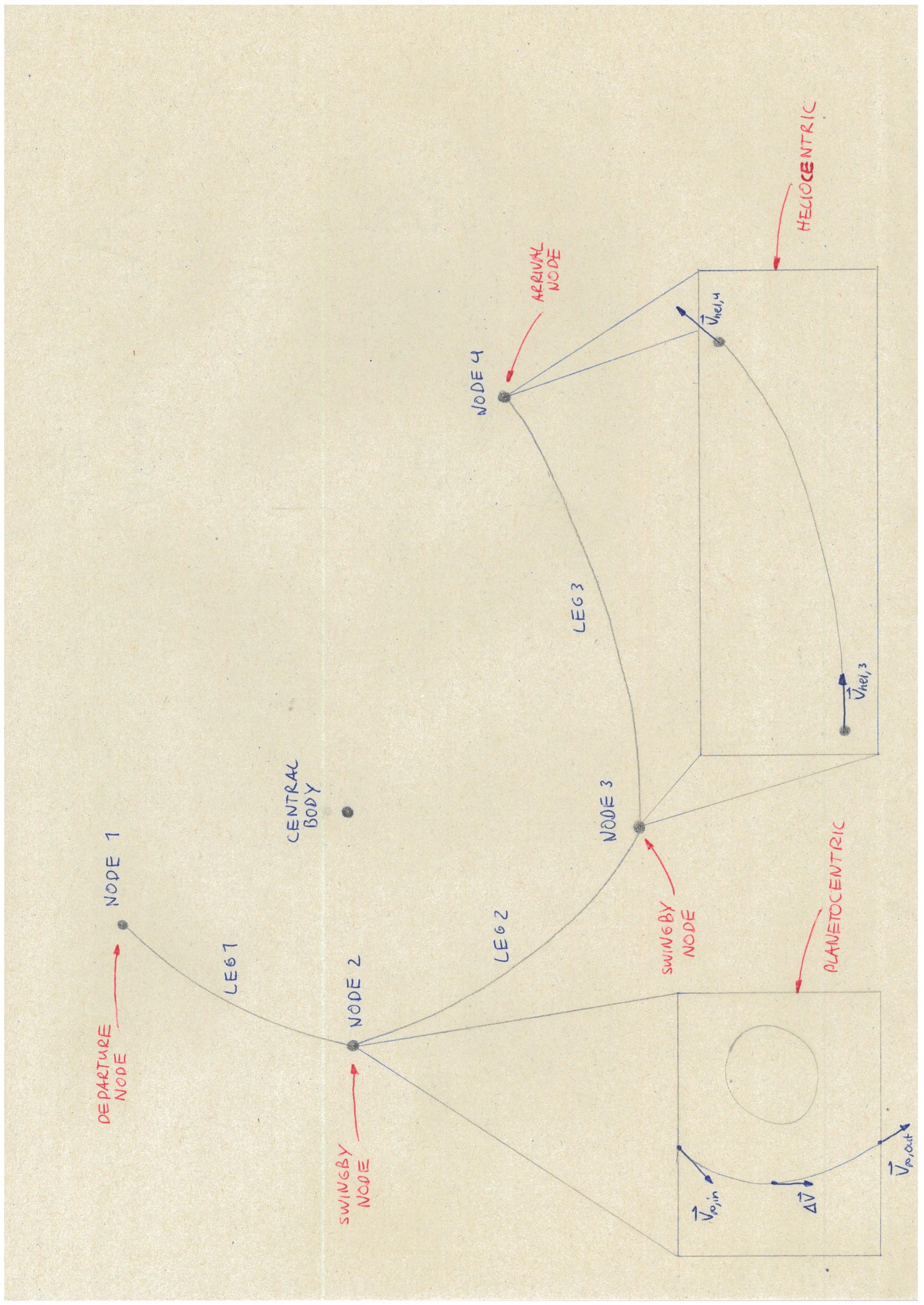
Before evaluating any transfer, it is useful to introduce the concept of nodes and legs more. To assist in this, a schematic representation is given in the figure below. An MGA trajectory is given, with an arbitrary sequence. A number of nodes can be seen that represent the celestial body used as GA body, as well as a number of legs that connect the nodes together. A central body is given, as this is required for the heliocentric evaluation of the legs, but more on that later. A number of different nodes are used and annotated; these are explained below under Nodes and Their Parameters.
It is crucial to understand that both the nodes and legs have an incoming and outgoing velocity vector and that these are determined in different frames. The key difference being that the incoming/outgoing velocities of the legs are evaluated in a heliocentric frame – assuming the Sun is the central body – and the incoming/outgoing velocities of the nodes are evaluated in a planetocentric frame – assuming a planet is the GA target. The velocity vectors are converted in to the respective frame to evaluate the unknown parameters. Which parameters are unknown depends on the type of leg and node, which is explained later. For more details on the difference in reference frame and the patching of these trajectories, see section 4.4.2/3 Musegaas (2012).
Supported models#
At present, the types of legs are supported (more details can be found below):
Unpowered legs: A purely ballistic (Keplerian) trajectory between nodes
Velocity-based deep-space maneuver (DSM) legs: A ballistic trajectory between nodes, with the addition of a single impulsive maneuver during the leg (parameterized by its velocity)
Position-based DSM legs: A ballistic trajectory between nodes, with the addition of a single impulsive maneuver during the leg (parameterized by its position)
Spherical-shaping legs: A shape-based low-thrust trajectory using the spherical shaping method
Hodographic-shaping legs: A shape-based low-thrust trajectory using the hodographic shaping method
At present, the types of nodes are supported (more details can be found below):
Departure node: Only available for the first node, to incorporate \(\Delta V\) required to escape from a parking orbit around the first node
Swingby node: A node assuming a hyperbolic trajectory w.r.t. the node, with the possibility of performing an impulsive maneuver at periapsis (see Nodes and Their Parameters).
Arrival node: Only available for the final node, to incorporate \(\Delta V\) required to enter a closed orbit around the final node
Each leg and node has its own free parameters, which must be provided by the user to evaluate the performance of the overall trajectory (see below).
General Procedure#
To create a transfer trajectory, the user must define settings for the nodes and legs, after which these settings are processed to create the transfer trajectory.
First, the transfer trajectory module can be imported with:
from tudatpy.trajectory_design import transfer_trajectory
The most commonly-used for procedure for creating an settings of the trajectory is to use factory functions to get the transfer leg has the same type (e.g. all unpowered, all spherical-shaping, etc.). The factory functions to create a set of node and leg settings is:
Unpowered legs:
mga_settings_unpowered_unperturbed_legs().Velocity-based DSM legs:
mga_settings_dsm_velocity_based_legs().Position-based DSM legs:
mga_settings_dsm_position_based_legs().Spherical-shaping legs:
mga_settings_spherical_shaping_legs().Hodographic-shaping legs:
mga_settings_hodographic_shaping_legs()ormga_settings_hodographic_shaping_legs_with_recommended_functions()(for manual definition or recommended automatic definition of shaping functions, respectively).
Manually creating settings for single legs and nodes is described below.
The complete procedure for creating and analyzing an MGA transfer consists of the following. The associated code snippets are taken from this example application, for an unpowered leg Cassini (EVVEJS) transfer trajectory:
Define the transfer settings: The transfer leg settings and node settings a are created. These are defined using the body order (bodies through which the spacecraft will pass), the departure and arrival orbit (semi-major axis and eccentricity) and other settings specific to each leg type. Selecting the semi-major axis of the departure/arrival orbit as \(a = \infty\) corresponds to having the spacecraft depart/arrive from/to the edge of the initial/final body’s sphere of influence (e.g. with zero hyperbolic excess velocity).
# Define central body
central_body = 'Sun'
# Define the order of bodies (nodes) for gravity assists
transfer_body_order = ['Earth', 'Venus', 'Venus', 'Earth', 'Jupiter', 'Saturn']
# Define the departure and insertion orbits
departure_semi_major_axis = np.inf
departure_eccentricity = 0.
arrival_semi_major_axis = 1.0895e8 / 0.02
arrival_eccentricity = 0.98
# Define the trajectory settings for both the legs and at the nodes
transfer_leg_settings, transfer_node_settings = transfer_trajectory.mga_settings_unpowered_unperturbed_legs(
transfer_body_order,
departure_orbit=(departure_semi_major_axis, departure_eccentricity),
arrival_orbit=(arrival_semi_major_axis, arrival_eccentricity))
Create the transfer trajectory object: Through
create_transfer_trajectory().
# Create physical environment
bodies = ...
# Create the transfer calculation object
transfer_trajectory_object = transfer_trajectory.create_transfer_trajectory(
bodies,
transfer_leg_settings,
transfer_node_settings,
transfer_body_order,
central_body)
Evaluate the transfer: Select the node times, node parameters, and leg parameters, and use them to evaluate the transfer through
evaluate(). These parameters are described in the following sections. Note that, in the case of an optimization, this function is called repeatedly to evaluate the transfer trajectory with different properties.
# Define free parameters
node_times = ...
leg_free_parameters = ... # (empty)
node_free_parameters = ... # (empty)
# Evaluate the transfer with given parameters
transfer_trajectory_object.evaluate( node_times, leg_free_parameters, node_free_parameters )
Retrieve the results: Use
TransferTrajectory’s properties or functions to retrieve the \(\Delta V\), time of flight, state history, acceleration history, etc.
# Retrieve total Delta V
total_delta_v = transfer_trajectory_object.delta_v
All available functions and classes are described in detail in the relevant entry of the API reference. For applications see the MGA trajectories example for setting up high- and low-thrust transfers and this Cassini 1 example for an optimization using PyGMO.
Manually Creating the Transfer Settings#
While in many cases the transfer settings can be created using the factory functions listed in the previous section, there are some cases where the manual creation of these should be preferred. These include transfers with mixed types of legs. The creation of the transfer settings can be divided into two steps: creation of the legs settings and creation of the nodes settings.
The legs settings are a list with the settings of each leg constituting the transfer. The settings of an individual leg can be retrieved using the appropriate factory function:
Unpowered legs:
unpowered_leg().Velocity-based DSM legs:
dsm_velocity_based_leg().Position-based DSM legs:
dsm_position_based_leg().Spherical-shaping legs:
spherical_shaping_leg().Hodographic-shaping legs:
hodographic_shaping_leg().
The nodes settings are a list with the settings of each node constituting the transfer. There are three main types of nodes: departure, swingby, and arrival nodes. The initial node is usually a departure node (although it can also be a swingby node), the intermediate nodes are always swingby nodes (at the time of writing), and the final is usually an arrival node (although it can also be a swingby node). Selecting the initial and final nodes as swingby nodes is useful when individually analyzing different parts of a transfer or when a mission’s objective is to do a swingby of the final body.
The settings of an individual node can be retrieved using the appropriate factory function:
Departure node:
departure_node().Swingby node:
swingby_node().Arrival node:
capture_node().
Note
The nodes and legs settings should have the same number of elements as the number of, respectively, nodes and legs in the transfer.
An example of manual creation of nodes and legs settings can be found below. The transfer body order, time of flight values per leg, and number of revolutions per leg are given as input. The definition of the departure and arrival input is necessary as well for the departure and capture nodes, respectively. Subsequently, as shaping functions have to be given for each leg, a loop is performed over the number of legs that add the recommended shaping functions as given by [Gondelach, 2012]. Finally, a node for each planet in the transfer body order must be given: A departure node, swingby nodes equal to the number of GA’s, and a capture node.
Required
from tudatpy.dynamics import propagation_setup from tudatpy.dynamics import environment_setup from tudatpy.trajectory_design import shape_based_thrust from tudatpy.trajectory_design import transfer_trajectory import numpy as np
# Define the order of bodies (nodes) for gravity assists
transfer_body_order = ['Earth', 'Venus', 'Venus', 'Earth', 'Jupiter', 'Saturn']
# define ToF values per leg
time_of_flight = np.array([1.97844702e+07, 6.68197546e+07, 1.00154317e+07, 3.2306349e+8, 4.21392438e+8]) #s
# define number of revolutions per leg
number_of_revolutions = np.array([2, 0, 1, 1, 0])
# Define the departure and insertion orbits
departure_semi_major_axis = np.inf
departure_eccentricity = 0.
arrival_semi_major_axis = 1.0895e8 / 0.02
arrival_eccentricity = 0.98
# Determine number of legs and GA's
no_of_legs = len(transfer_body_order) - 1
no_of_gas = len(transfer_body_order) - 2
#Create transfer leg settings
transfer_leg_settings = []
for i in range(no_of_legs):
radial_velocity_functions = shape_based_thrust.recommended_radial_hodograph_functions(time_of_flight)
normal_velocity_functions = shape_based_thrust.recommended_normal_hodograph_functions(time_of_flight)
axial_velocity_functions = shape_based_thrust.recommended_axial_hodograph_functions(time_of_flight,
number_of_revolutions)
transfer_leg_settings.append(transfer_trajectory.hodographic_shaping_leg(
radial_velocity_functions, normal_velocity_functions, axial_velocity_functions))
#Create transfer node settings
transfer_node_settings = []
transfer_node_settings.append( transfer_trajectory.departure_node(departure_semi_major_axis, departure_eccentricity) )
for i in range(no_of_gas):
transfer_node_settings.append( transfer_trajectory.swingby_node() )
transfer_node_settings.append( transfer_trajectory.capture_node(arrival_semi_major_axis, arrival_eccentricity) )
Having created the legs and nodes settings, the same procedure described above for creating the transfer trajectory object, evaluating it, and retrieving the computed data can be followed.
To evaluate the transfer one needs to provide a list of transfer parameters. These are:
Node times
Leg parameters
Node parameters
It is possible to a see a list of the parameters required for a given transfer via the
print_parameter_definitions() function.
The node times always need to be specified (regardless of the leg and node times), and correspond to the epoch when the spacecraft reaches each planet/body. The node and leg parameters, which depend on the specific node and leg type, are described next. Note that, for certain leg and node types, there are no free parameters and the trajectory is fully defined by the node times (as is the case for an a series of unpowered legs).
Legs and Their Parameters#
The parameters associated with each type of leg are listed below. For more detailed descriptions, the reader is referred to the literature listed in the API reference for the factory function of each leg type.
Unpowered legs: Does not have leg parameters.
Velocity-based DSM legs: 1 leg parameter:
Fraction of the leg’s time-of-flight at which DSM is applied (\(\in [0,1]\)).
Position-based DSM legs: 4 leg parameters:
Fraction of the leg’s time-of-flight at which DSM is applied (\(\in [0,1]\)).
Position of the DSM in spherical coordinates, with respect to a frame with the x-axis aligned with the position of the departure body, z-axis aligned with the angular momentum of the departure body, y-axis selected to form a right-handed frame. The spherical position is specified as: dimensionless radial position (using as unit of length the radial position of the departure body), in-plane angle, out-of-plane angle.
Note
A leg with position-based DSMs requires more leg parameters than one with velocity-based DSMs. However, a transfer constituted by the former will require less node parameters than one constituted by the latter.
Spherical-shaping legs: 1 leg parameter:
Integer number of revolution (\(\geq 0\)).
Hodographic-shaping legs: at least 1 leg parameter:
Integer number of revolution (\(\geq 0\)).
Free coefficients of shaping functions (number of coefficients is greater or equal to zero).
Finally, and before moving on to the description of the node parameters, it is important to analyze the boundary conditions used for the evaluation of each leg of the transfer. These conditions are dealt with internally by the model; hence, the user never has direct contact with them. Nevertheless, understanding them is essential for describing the node parameters.
Four types of boundary conditions are possible: initial position, initial velocity, final position, and final velocity. A given leg will receive some of these as input and produce the others as output. The inputs and outputs associated with each leg type are summarized in the following table. For example, a velocity-based DSM leg receives as input its initial position, initial velocity, and final position, and outputs its final velocity.
Leg initial position |
Leg initial velocity |
Leg final position |
Leg final velocity |
|
|---|---|---|---|---|
Unpowered |
Input |
Output |
Input |
Output |
DSM-Velocity |
Input |
Input |
Input |
Output |
DSM-Position |
Input |
Output |
Input |
Output |
Spherical shaping |
Input |
Input |
Input |
Input |
Hodographic shaping |
Input |
Input |
Input |
Input |
Nodes and Their Parameters#
As already mentioned, there are three main types of nodes: departure, swingby, and arrival nodes. These are the only types with which the user has direct contact. However, internally, these are further divided into subtypes. While a user does not need to understand these subtypes for using the MGA model, the user does need to if he/she wishes to understand what a given node is doing behind the scenes and what node parameters are required for a given transfer.
The various node subtypes are described next. The node subtype used in a given instance depends on the types of the legs that precede and follow it; more specifically, it depends on the inputs and outputs of those legs. Using the previous table specifying the inputs and output of each leg and the following description of each node subtype, the user will be able to predict exactly which nodes are used for a given set transfer, as well as the required node parameters.
Note that the incoming velocity of a node corresponds to the final velocity of the previous leg and the outgoing velocity of a node corresponds to the initial velocity of the following leg.
Departure node: Usually, this is the initial node of the transfer. The outgoing relative velocity at the node (i.e. the excess velocity) is either retrieved from the following leg or specified by the user. The node computes the impulsive \(\Delta V\) that needs to be applied at the periapsis of the departure elliptic orbit to enter a hyperbolic orbit with the target excess velocity, according to section 4.6 of Musegaas (2012). This node is subdivided into the following types:
Node with leg-defined outgoing velocity: Does not require node parameters.
Node with user-defined outgoing velocity: Node parameters:
Outgoing velocity vector relative to the node, specified with respect to a TNW reference frame defined using the node’s inertial state. The outgoing relative velocity is specified in spherical coordinates: norm of the velocity, in-plane angle (\(\in [0, 2\pi]\)), out-of-plane angle (\(\in [-\pi/2, \pi/2]\)).
Arrival node: Usually, this is the final node of the transfer. The incoming relative velocity at the node (i.e. the excess velocity) is either retrieved from the previous leg or specified by the user. The node computes the impulsive \(\Delta V\) that needs to be applied at the periapsis of the hyperbolic orbit with the specified excess velocity to enter the arrival elliptical orbit, according to section 4.6 of Musegaas (2012). This node is subdivided into the following types:
Node with leg-defined incoming velocity: Does not require node parameters.
Node with user-defined incoming velocity: Node parameters:
Incoming velocity vector relative to the node, specified with respect to a TNW reference frame defined using the node’s inertial state. The incoming relative velocity is specified in spherical coordinates: norm of the velocity, in-plane angle (\(\in [0, 2\pi]\)), out-of-plane angle (\(\in [-\pi/2, \pi/2]\)).
Swingby node: Usually, these are the intermediate nodes of the transfer. The swingby node is subdivided into the following types:
Node with legs-defined incoming and outgoing velocity: Does not require node parameters. Computes the \(\Delta V \geq 0\) that needs to be applied during the swingby to patch the incoming and outgoing velocities, according to section 4.5.2 of Musegaas (2012).
Node with leg-defined incoming velocity, user-defined swingby: Given the known incoming velocity, the node forward propagates the swingby using the user-specified parameters, according to sections 4.4.2/3 of Musegaas (2012). Node parameters:
Swingby periapsis radius
Swingby \(\Delta V\) (applied at the periapsis)
Outgoing-velocity rotation angle. Defined according to Appendix 7a of “Spacecraft Trajectory Optimization”, Conway (2010). This angle defines the plane in which the swingby occurs (different from the bending angle, which is defined inside that plane). This angle takes values in \([0, 2\pi]\).
Node with user-defined swingby, leg-defined outgoing velocity: Given the known outgoing velocity, the node backward propagates the swingby using the user-specified parameters. Analogous to sections 4.4.2/3 of Musegaas (2012). Node parameters:
Swingby periapsis radius
Swingby \(\Delta V\) (applied at the periapsis)
Incoming-velocity rotation angle. Defined analogously to the outgoing-velocity rotation angle, which in turn is defined according to Appendix 7a of “Spacecraft Trajectory Optimization”, Conway (2010). This angle defines the plane in which the swingby occurs (different from the bending angle, which is defined inside that plane). This angle takes values in \([0, 2\pi]\).
Node with user-defined incoming, user-defined swingby: Given the known incoming velocity, the node forward propagates the swingby using the user-specified parameters, according to sections 4.4.2/3 of Musegaas (2012). Node parameters:
Incoming velocity vector relative to the node, specified with respect to a TNW reference frame defined using the node’s inertial state. The incoming relative velocity is specified in spherical coordinates: norm of the velocity, in-plane angle (\(\in [0, 2\pi]\)), out-of-plane angle (\(\in [-\pi/2, \pi/2]\)).
Swingby periapsis radius
Swingby \(\Delta V\) (applied at the periapsis)
Outgoing-velocity rotation angle. Defined according to Appendix 7a of “Spacecraft Trajectory Optimization”, Conway (2010). This angle defines the plane in which the swingby occurs (different from the bending angle, which is defined inside that plane). This angle takes values in \([0, 2\pi]\).